注意:
如果系统中安装了扩展轴,E1,E2,以及E3表示扩展轴位置信息。
显示位置状态:
步骤:
按下[POSN ]键。
选择适当的坐标系:
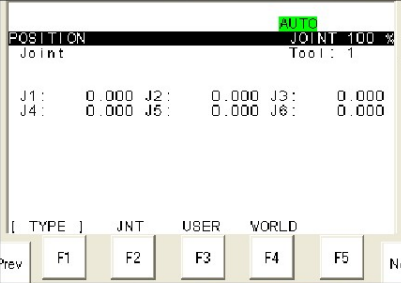
按F2[JNT],将看到如下的类似屏幕:
Tool:表示当前使用的工具坐标号;
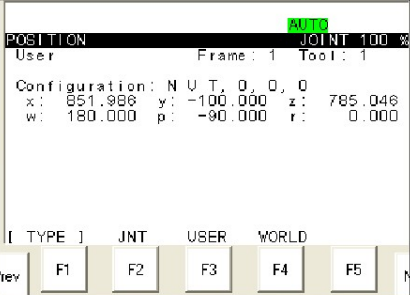
按F3[USER],将看到如"下的类似屏幕:
Tool:表示当前使用的工具坐标号;
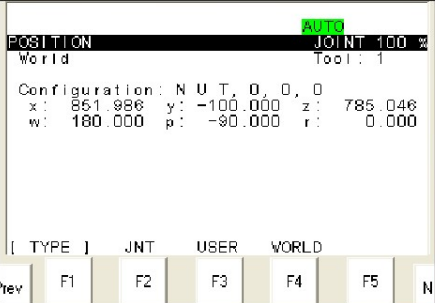
按F4[WORLD]将看到如下的类似屏幕:
以上内容来源于:网络
侵权删
更多机器人咨询请咨询:发那科机器人

- 下一篇:发那科机器人粉尘爆炸的预防
- 上一篇:发那科工业机器人如何维护
FANUC集成商

 联系我们
联系我们
 联系方式 联系方式
站内搜索 新闻分类
|
新闻中心 FANUC:机器人如何确认当前位置状态讲解
发布时间:2022-09-14 浏览次数:2916 返回列表
POSITION屏幕以关节角度或直角坐标系显示位置信息。随着机器人的运动,屏幕上的位置信息不断地动态更新。屏幕上的位置信息只是用来显示的,不能修改。
注意: 如果系统中安装了扩展轴,E1,E2,以及E3表示扩展轴位置信息。
显示位置状态: 步骤: 按下[POSN ]键。 选择适当的坐标系:
按F2[JNT],将看到如下的类似屏幕:
Tool:表示当前使用的工具坐标号;
按F3[USER],将看到如"下的类似屏幕:
Tool:表示当前使用的工具坐标号;
按F4[WORLD]将看到如下的类似屏幕: 以上内容来源于:网络
|
联系热线:18621383601 联系人:石川 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 FANUC集成商